Jr. Systems Engineer
I have noticed dead reckoning error accumulation over time as a big challenge, up to 2 meters per minute (in scenarios like rough terrain, strong winds, or frequent accelerations) without correction. Can you help me in understanding this concept of dead reckoning?
Sr. Systems Engineer
Yes, Sure. Even the slightest data inaccuracy is critical in dead reckoning. Error in heading(even 0.5degree) can lead to significant positional errors over distance. Dead reckoning at first glance, seems easy. However, the calculation of dead reckoning is affected by various factors.
Jr. Systems Engineer
Do these external factors complicate dead reckoning and is there any method to overcome this?
Sr. Systems Engineer
Yes, these external factors like mode of transport, wind currents, and terrain can add to the complexity of dead reckoning. Modern accelerometers, gyroscopes, and sensor fusion algorithms, like Unscented Kalman Filter (UKF) or Extended Kalman Filter (EKF), help significantly reduce drift by a large margin, providing continuous data correction.
Jr. Systems Engineer
How can we overcome the issues in dead reckoning and is it reliable as a standalone technology for long-run data processing?
Sr. Systems Engineer
The combination of strategies like sensor optimization, and frequent external corrections methodologies according to the needs will provide a better solution. Also, the symbiotic integration of dead reckoning and GNSS can boost accuracy, and nullify the limitations of both to provide a more reliable solution. To know more, continue reading the blog.
Introduction
Dead reckoning navigation offers a fascinating glance into the history of navigation, tracing its origins from ancient maritime endeavors to its indispensable role in modern navigation systems. Dead reckoning is a foundational technique that has evolved significantly, integrating with cutting-edge technology to ensure accuracy and safety in various domains, from automotive to aviation.
What is Dead Reckoning in Navigation?
Dead reckoning is a traditional navigation technique that involves estimating one’s current position based on a previously determined location. This method advances the position using known or estimated speeds over time and course direction. This approach, which is fundamental to dead reckoning navigation, has been used for centuries and remains relevant today. The term originates from maritime navigation, where dead reckoning was used by sailors to estimate their position when no landmarks or stars could be seen, using tools like a compass and logs to measure speed and direction. This method has been applied in various forms of navigation, including on land, at sea, and in the air.
Dead reckoning navigation is a technique used by travelers to estimate their current position based on their previous known position, speed, and direction of travel. However, dead reckoning navigation doesn't account for external factors like wind or currents, so it's not always perfectly accurate. While dead reckoning is useful, especially in situations where other navigation tools are unavailable, it's important to use it alongside other methods to avoid errors. This dead reckoning methodology seems straightforward, but involves complex calculations, especially when accounting for variables like wind, currents, or change in speed. Dead reckoning navigation, therefore, requires careful attention to these variables to ensure accuracy.
Advanced Technologies in Dead Reckoning Navigation
In the dynamic realm of navigation technologies, dead reckoning navigation remains a cornerstone, significantly enhanced by advanced algorithms like the Kalman Filter. These advanced techniques ensure the precision of dead reckoning in various applications where accurate positioning is critical. This powerful algorithm is at the core of sophisticated dead reckoning systems, meticulously processing diverse sensor data to precisely estimate the position of a vehicle or device. It adeptly integrates noisy data from multiple sources, proving indispensable in scenarios where GPS signals are compromised. The continuous refinement of data by the Kalman Filter ensures that dead reckoning navigation remains accurate and reliable, especially in GPS-denied environments. This capability not only broadens our understanding but also paves the way for innovative applications in various technological fields like autonomous vehicles and complex mobile navigation systems. Understanding and implementing this integration is crucial for advancing the efficiency and reliability of dead reckoning navigation systems.
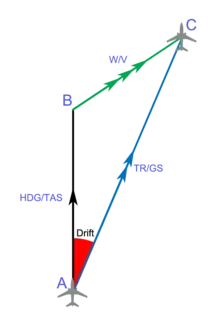
Understanding How Dead Reckoning Works in Navigation
The efficacy of dead reckoning navigation hinges on three pivotal elements: the starting point, speed, and direction (or heading). Each component is crucial in determining the accuracy of dead reckoning in various forms of navigation.
Starting Point
The accuracy of DR begins with a precise starting location. Any errors in the starting point can magnify over distance.
Speed
Speed must be continuously monitored and accurately measured to ensure the reliability of the DR calculation.
Direction or Heading
The navigator must know the exact direction of travel. Even slight deviations can lead to significant errors over long distances.
Dead Reckoning Calculation Model
The basic formulas used in dead reckoning for calculating the current position are relatively straightforward. They involve simple arithmetic based on speed, time, and direction. Here are the key formulas:
Distance Traveled (D): is calculated by multiplying the speed (S) by the time (T). D=S×T
Here, 'D' is the distance traveled, 'S' is the speed at which the object is moving, and 'T' is the time for which the object has been moving. Speed should be in a consistent unit relevant to the mode of transport (e.g., knots for ships, miles per hour or kilometers per hour for vehicles), and time should be in hours.
New Position Calculation: New Position Calculation: The new position is calculated by updating the previous position based on the distance traveled in a specific direction (heading).
- If moving in a straight line due north or south, you would simply add or subtract the distance traveled from the starting latitude.
- If moving in a straight line due north or south, you would simply add or subtract the distance traveled from the starting latitude.
However, if the direction is not strictly along the cardinal points, you would use trigonometry to calculate the new position
ΔLat=D×cos(θ)
ΔLong=D×sin(θ)
where:
- ΔLat is the change in latitude,
- ΔLong is the change in longitude,
- D is the distance traveled,
- θ is the heading (direction) in degrees from north (0 degrees is due north, 90 degrees is due east, etc.).
To get the new latitude or longitude, you would then add or subtract these changes from the original latitude or longitude, respectively, depending on the direction:
- New Latitude = Original Latitude ± ΔLat
- New Longitude = Original Longitude ± ΔLong
The signs depend on the direction of travel; you would add for northward or eastward movements and subtract for southward or westward movements. Remember, these calculations are simplified and assume a flat Earth, which is acceptable for small distances. For larger distances, especially at the latitudes closer to the poles, corrections for the Earth's curvature might be necessary, and the calculations become more complex.
Dead Reckoning Navigation vs. GPS and INS
| Navigation System | Strengths | Ideal Use Cases | Limitations |
|---|---|---|---|
| Dead Reckoning | No need for external signals | Environments with signal obstructions (e.g., tunnels, dense urban areas) | Accuracy decreases over time without correction |
| GPS | High accuracy in open skies | Open environments with clear sky access | Struggles with interference and in enclosed spaces |
| INS (Inertial Navigation System) | Reliable without external reference | Underwater, underground, or any GPS-denied areas | Requires periodic recalibration; high initial cost |
Factors Affecting the Accuracy of Dead Reckoning
Dead reckoning navigation accuracy can be influenced by various factors, which may introduce errors into dead reckoning calculations during navigation. These include:
Speed Measurement Errors
Faulty equipment or unaccounted changes in speed due to environmental conditions like wind or water currents can cause inaccuracies in estimating the distance traveled.
Direction Errors
Inaccuracies in determining the true heading, due to compass errors like deviation and variation, can significantly affect positional accuracy.
Drift
External forces, such as wind or ocean currents, can unknowingly alter the course of the vehicle or vessel, leading to deviation from the intended path.
Starting Point Errors
An incorrect initial position can lead to progressively larger errors in subsequent positions calculated using dead reckoning.
Timekeeping Errors
Inaccuracies in time tracking can lead to miscalculations of distance, as the calculation depends on time elapsed.
Terrain and Environmental Factors
In land navigation, terrain variations can impact speed and distance traveled, while in marine navigation, factors like water depth and seabed conditions can affect vessel dynamics.
Technical Limitations
Assumptions made in dead reckoning calculations, such as a flat Earth, can introduce errors, especially over long distances or near the poles.
Human Error
Mistakes in data recording, speed estimation, or position calculation can significantly affect dead reckoning accuracy.
For enhanced accuracy, navigators combine dead reckoning with other methods like GPS or celestial navigation for cross-verification and correction.
Additional complexities in dead reckoning include:
Earth Curvature
Corrections for the Earth's spheroid shape are necessary for accurate long-distance navigation, particularly in aviation or maritime contexts.
Coriolis Effect
While minor for surface navigation, this effect can influence long-distance trajectories, especially at high speeds or latitudes.
Altitude
In aviation, altitude affects airspeed and aircraft performance, requiring adjustments for accurate navigation.
Tides and Stream Sets
These natural phenomena can significantly affect marine navigation, altering a vessel's course.
Slippage and Ground Effect
On land, vehicle slippage on various terrains can lead to discrepancies, while in aviation, the ground effect near the surface can impact aircraft performance.
Equipment Calibration
Accurate navigation depends on the proper calibration and maintenance of equipment like speedometers, compasses, and chronometers.
Atmospheric Conditions
Weather conditions can affect travel speed and direction across different navigation modes.
Addressing these errors requires using sophisticated tools, making corrections for known issues, and updating estimated positions with actual observations.
Applications of Dead Reckoning in Navigation
Automotive
In the realm of automotive navigation, dead reckoning navigation significantly enhances accuracy, particularly in environments where GPS or GNSS signals are weak or non-existent. The importance of dead reckoning in navigation is most pronounced in urban canyons, tunnels, and other challenging environments. Urban canyons, tunnels, and other challenging environments are where dead reckoning navigation's value is most pronounced, providing continuous navigation information by filling in the gaps when satellite signals fail. Dead reckoning navigation ensures that drivers have reliable positional information even when traditional satellite signals are obstructed.
Marine Navigation
On the high seas, dead reckoning navigation serves as a critical redundancy to Global Navigation Satellite Systems (GNSS). The unpredictable nature of the marine environment, with its potential for electronic interference and signal blockage, makes dead reckoning navigation an essential backup. Dead reckoning navigation ensures the safety of vessels by providing a means to navigate even when satellite navigation is compromised. This redundancy is vital for maintaining accurate course and position in the absence of reliable satellite data.
Aviation
The aviation industry benefits from dead reckoning navigation by enhancing air traffic safety and efficiency. In situations where GNSS signals are unreliable or navigation systems fail, dead reckoning navigation provides an alternative method for estimating the position of aircraft. Dead reckoning's applications extend into emerging technologies and sectors, including unmanned aerial vehicles (UAVs) and space exploration. In these areas, dead reckoning navigation offers a failsafe mechanism in complex navigation systems, ensuring continuous and accurate positional data even in challenging environments.
Enhancing Navigation: Dead Reckoning and GNSS Integration
Integrating Dead Reckoning navigation with GNSS offers a synergistic solution that significantly enhances the precision and reliability of navigation systems. This blend is particularly vital in connected vehicles and marine navigation, where it ensures a seamless travel experience. By leveraging the strengths of both Dead Reckoning navigation and GNSS, this integrated approach effectively compensates for their individual limitations. Consequently, the combined system provides a robust Dead Reckoning navigation solution that delivers unmatched accuracy, even under challenging environmental conditions where single systems might underperform.
Advancements in Dead Reckoning Navigation Technology
The horizon for Dead Reckoning navigation technology is promising, with anticipated advancements set to transform autonomous vehicle navigation and other cutting-edge applications. Emerging innovations in sensor technology, coupled with advancements in artificial intelligence (AI) and machine learning (ML), are poised to significantly improve the precision and efficiency of Dead Reckoning navigation systems. These developments promise to enable more accurate and dependable Dead Reckoning navigation across various transportation modes, making it a cornerstone technology for the future of autonomous and semi-autonomous vehicles. This evolving landscape underscores the growing importance of Dead Reckoning navigation in achieving high-level automation and enhanced operational safety in next-generation transportation solutions.
GNSS-Enabled Cellular IoT Modules

Closing Notes
The significance of Dead Reckoning in modern navigation systems cannot be overstated. Its role in ensuring safety and efficiency across various domains—from the high seas to the open skies and the roads in between—remains as relevant today as it was in the age of sail. As technology advances, the principles of DR continue to underpin the next generation of navigation systems and find its place in modern satellite network communications.
Amusing Tech Chronicles
Facts and Anecdotes related to this edition of Wireless By Design
The Baker's Guess
Dead reckoning is just like getting a perfect cake baked with the start time, estimated baking time, and the moment of perfect doneness.

The Road Trip
On a road trip in an area without cell service, you estimate your progress and direction based on the last known town, your speed, and the time elapsed. This navigation challenge is a practical example of dead reckoning from the real world.
The Explorer's Guide
Navigating unknown terrain without modern tools is pure dead reckoning. Starting from a known landmark and using direction, pace, and time blends intuition, experience, and environmental cues to navigate and discover.
Go Beyond and Explore
What equipment is typically used for dead reckoning?
The specific equipment used depends on the context and environment. Modern electronic tools like inertial navigation systems (INS), odometers, gyroscopes, and accelerometers have significantly improved the accuracy and ease of dead reckoning. Traditional tools like compasses, clocks, speedometers, and log lines can be used in situations when technology falls short.
What are the limitations of dead reckoning?
The accuracy of dead reckoning decreases over time without external reference points because errors in speed or direction estimations accumulate, leading to increased positional error. Other factors contributing to limitations are:
- Environmental influences: Wind, currents, changes in terrain, and even subtle magnetic variations can significantly affect speed and direction, leading to errors in calculations.
- Tool limitations: Even the most precise tools have inherent inaccuracies, impacting calculations. Imperfect calibration or malfunctions can further amplify errors.
- Human error: Mistakes in measurements, calculations, or interpretations of environmental cues can contribute to inaccuracies.
- Limited information: Dead reckoning relies solely on self-contained data without external reference points. Without periodic corrections from sources like landmarks or celestial navigation, errors accumulate faster.
- Complexity of calculations: Dead reckoning involves trigonometry and other calculations that can become complex, increasing the possibility of errors, especially when done manually.
How do dead reckoning and GPS tracking work together in navigation systems?
In many navigation systems, dead reckoning and GPS tracking are integrated to provide accurate and reliable location information. When GPS signals are weak or unavailable (e.g., in tunnels, urban canyons, or dense forests), the system uses dead reckoning to estimate the current position. Once GPS signals are strong again, the system updates the position to correct any drift that occurred during the dead reckoning phase. To know more, check out our blog on navigational systems.
Can RTK technology compensate for the limitations of dead reckoning?
Yes, RTK technology can significantly compensate for dead reckoning's limitations, particularly its tendency for error accumulation over time. By providing precise, real-time location corrections, RTK allows navigation systems to adjust dead reckoning estimates, maintaining accuracy even during extended periods without GPS signals. Check out RTK technology to learn more. Many advanced navigation systems utilize a combination of dead reckoning, RTK, INS, and GPS tracking to provide users with the most accurate and reliable positioning possible.
Author

Drishya Manohar
Sr. Associate - Content Marketing



